

Creating step designs from KiCAD for PSLab
PSLab hardware device is developed using KiCAD. It is an open source PCB designing tool which we can use for free and it has almost all the features needed to build a professional PCB. But it lacks one thing. It cannot generate and export 3D models. In fact there is a 3D viewer in KiCAD but there is no way to export it. When manufacturing PSLab devices, it was required by the manufacturers so that they can have a clear understanding how the components are placed. This step is necessary for them to design the production line.
Before we get started, there are few prerequisites to help us get this done. They are as follows;
- FreeCAD: Open source 3D modeling software
- KiCAD step up tools: External library to import KiCAD PCB layouts to FreeCAD
You may need to follow installation instructions to install FreeCAD from the link given. Once we are all set, extract the KiCAD Stepup tools. There we can find a set of python libraries and some bash scripts. We can either use the scripts or type commands ourselves. I found scripts having some issues configuring paths.
To fire up FreeCAD with KiCAD stepup tools enabled, type the following command on your console;
$ freecad kicad-StepUp-tools.FCMacro
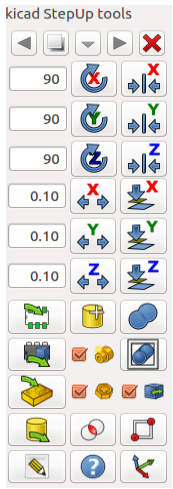
Make sure the console is pointing to the directory where the FCMacro file is located. This will open up FreeCAD and if you opened it already and saw the opening screen of FreeCAD, you’d notice a whole new toolbar is added.
Here you can see many tools related to import and export step files and 3D models from outside libraries and folders. Each tool is specific;
- Load-kicad-footprint:
This tool is useful to generate a step file for an individual PCB component, say a resistor into a step file.
- Export-to-kicad:
There are instances where when we design a custom foot print, and KiCAD doesn’t have the 3D model. In such a case we can export such a model to KiCAD
- Load-kicad:
This is the tool we are using to export PSLab PCB board to step format. Before we move on to this tool there is one last configuration we have to do. FreeCAD doesn’t know where we have put KiCAD 3D models. This library simply transforms the available 3D models in KiCAD into step files and build the final output combining all of them together as in the featured image of this blog post. To setup the 3D model path, in KiCAD, there is a path configuration option. Copy the path under “KISYS3DMOD”.
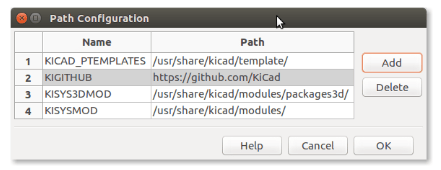
Figure 2: Path Configuration dialog box in KiCAD
And paste it into the ini file named “ksu-config.ini” which you can find in home folder.

Figure 3: Place to add 3D model path in ksu-config.ini file
Once that is done, click on the Load-KiCAD tool icon and browse to the repository where the PSLab hardware files are located at. Open the board file and FreeCAD will generate part by part and finally output the complete design. Now we can export the design in plenty of formats such as steps, stl another similar file format and many more.
Reference:









 Figure 1: UART Interface in PSLab
Figure 1: UART Interface in PSLab Figure 2: FTDI Module from
Figure 2: FTDI Module from 


You must be logged in to post a comment.