

Publish an Open Source app on Fdroid
Fdroid is a famous software repository hosted with numerous free and open source Android apps. They have a main repository where they allow developers hosting free and ad free software after a thorough check up on the app. This blog will tell you how to get your project hosted in their repository using steps I followed to publish the PSLab Android app.
Before you get started, make sure you have the consent from your developer community to publish their app on Fdroid. Fdroid requires your app to use all kind of open resources to implement features. If there is any closed source libraries in your app and you still want to publish it on Fdroid, you may have to reimplement that feature by any other mean without using closed source resources. They will also not allow to have Google’s proprietary “play-services” in your app along with proprietary ad services. You can find the complete inclusion policy document from their official page.
When your app is fully ready, you can get started with the inclusion procedure. Unlike how we are publishing apps on Google Play, publishing an app on Fdroid is as simple as sending a pull request to their main repository. That’s exactly what we have to do. In simple terms all we have to do is:
- Fork the Fdroid main data repository
- Make changes to their files to include our app
- Do a pull request
First of all you need a GitLab account as the Fdroid repository is hosted in GitLab. Once you are ready with a GitLab account, fork and clone the f-droid-data repository. The next step is to install the fdroid-server. This can be simply done using apt:
$ sudo apt install fdroidserver
Once that is done, go into the directory where you cloned the repository and run the following command to read current meta data where it saves all the information related to existing apps on Fdroid;
$ fdroid readmeta
This will list out various details about the current meta files. Next step is to add our app details into this meta file. This can be done easily using following command or you can manually create folders and files. But the following is safer;
$ fdroid import --url https://github.com/fossasia/pslab-android --subdir app
Replace the link to repository from the –url tag in the above command. For instance the following will be the link for fossasia-phimpme android;
$ fdroid import --url https://github.com/fossasia/phimpme-android --subdir app
This will create a file named as “org.fossasia.pslab” in the metadata directory. Open up this text file and we have to fill in our details.
- Categories
- License
- Web Site
- Summary
- Description
Description needs to be terminated with a newline and a dot to avoid build failures.
Once the file is filled up, run the following command to make sure that the metadata file is complete.
$ fdroid readmeta
Then run the following command to clean up the file
$ fdroid rewritemeta org.fossasia.pslab
We can automatically add version details using the following command:
$ fdroid checkupdates org.fossasia.pslab
Now run the lint test to see if the app is building correctly.
$ fdroid lint org.fossasia.pslab
If there are any errors thrown, fix them to get to the next step where we actually build the app:
$ fdroid build -v -l org.fossasia.pslab
Now you are ready to make the pull request which will then get reviewed by developers in Fdroid community to get it merged into their main branch. Make a commit and then push to your fork. From there it is pretty straightforward to make a pull request to the main repository. Once that is done, they will test the app for any insecurities. If all of them are passed, the app will be available in Fdroid!
Reference:
- Quick Start: https://gitlab.com/fdroid/fdroiddata/blob/master/README.md#quickstart
- Making merge requests: https://gitlab.com/fdroid/fdroiddata/blob/master/CONTRIBUTING.md#merge-requests


 Click and open “Bitmap2Component” icon which is similar to a “simple a”. This will open a window where you can import the logo image in png format.
Click and open “Bitmap2Component” icon which is similar to a “simple a”. This will open a window where you can import the logo image in png format.


 A dialog box will pop up to select the component. Click on the button “Select by Browser” to get a more interactive selection menu or you can simply type the name if you remember it correctly.
A dialog box will pop up to select the component. Click on the button “Select by Browser” to get a more interactive selection menu or you can simply type the name if you remember it correctly.

 Figure 1: Position of fuse in PSLab V4 PCB
Figure 1: Position of fuse in PSLab V4 PCB


 If we overlap the color map with the PSLab layout, we will be able to detect where user has clicked using Android onTouchEvent.
If we overlap the color map with the PSLab layout, we will be able to detect where user has clicked using Android onTouchEvent.











 Ellipse
Ellipse







 Surface mount components (SMD) are smaller in size. Due to this reason, it is hard to hand solder these components onto a printed circuit board. We use wave soldering or reflow soldering to connect them with a circuit.
Surface mount components (SMD) are smaller in size. Due to this reason, it is hard to hand solder these components onto a printed circuit board. We use wave soldering or reflow soldering to connect them with a circuit. Through Hole components (TH) are fairly larger than their SMD counter part. They are made bigger to make it easy for hand soldering. These components can also be soldered using wave soldering.
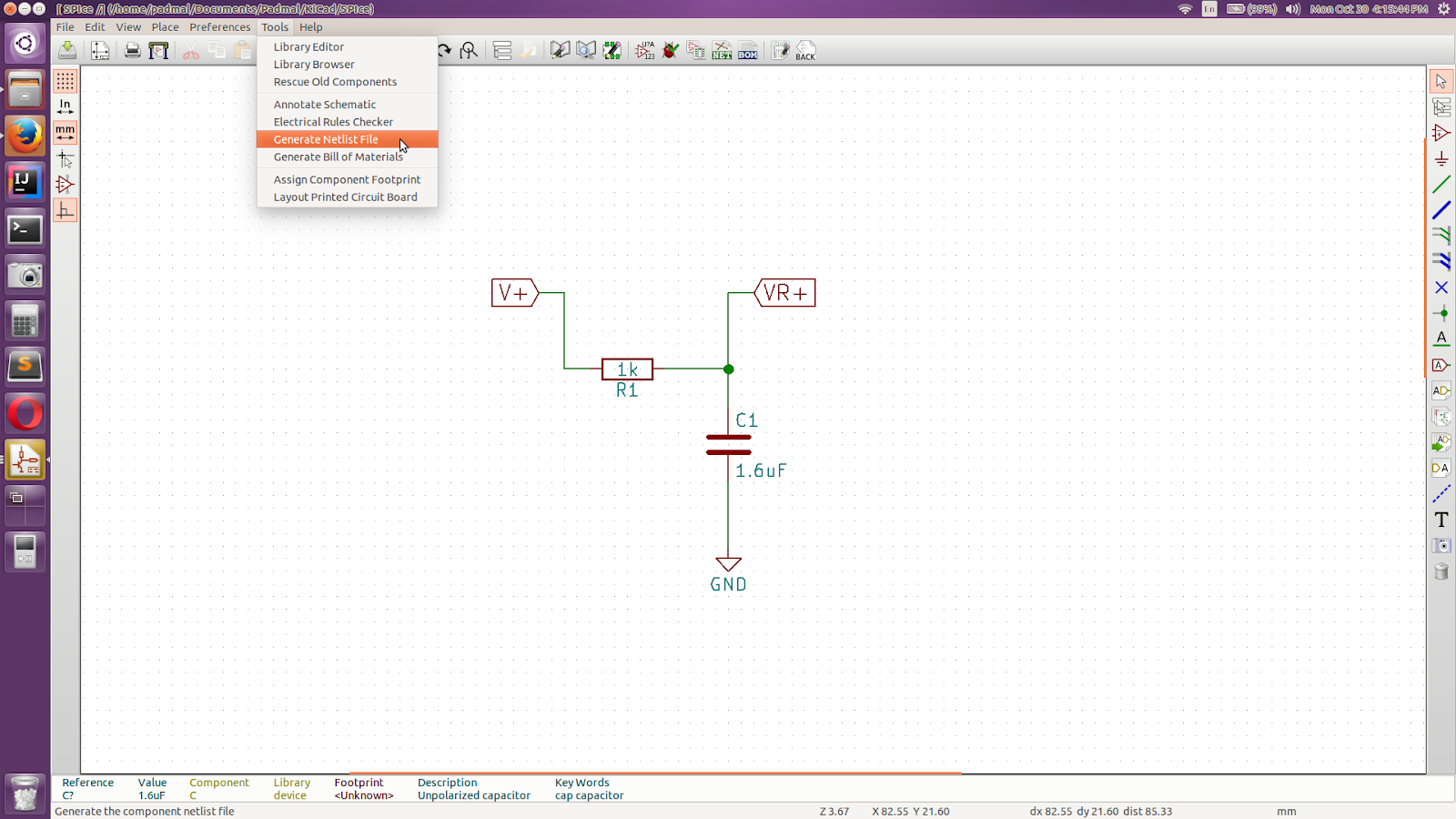
Through Hole components (TH) are fairly larger than their SMD counter part. They are made bigger to make it easy for hand soldering. These components can also be soldered using wave soldering. Go to “Eeschema” editor in KiCAD where the schematic is present and then click on the “BoM” icon in the menu bar. This will open a dialog box to select which plugin to use to generate the bill of materials.
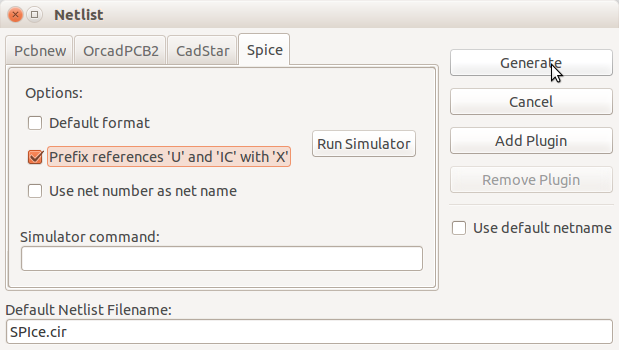
Go to “Eeschema” editor in KiCAD where the schematic is present and then click on the “BoM” icon in the menu bar. This will open a dialog box to select which plugin to use to generate the bill of materials. Initially there won’t be any plugins available in the “Plugins” section. As we are adding plugins to it, they will be listed down so that we can select which plugin we need. To add a plugin, click on the “Add Plugin” button to open the dialog box to browse to the specific plugin we have already downloaded. There are a set of available plugins in the KiCAD installation directory.
Initially there won’t be any plugins available in the “Plugins” section. As we are adding plugins to it, they will be listed down so that we can select which plugin we need. To add a plugin, click on the “Add Plugin” button to open the dialog box to browse to the specific plugin we have already downloaded. There are a set of available plugins in the KiCAD installation directory.



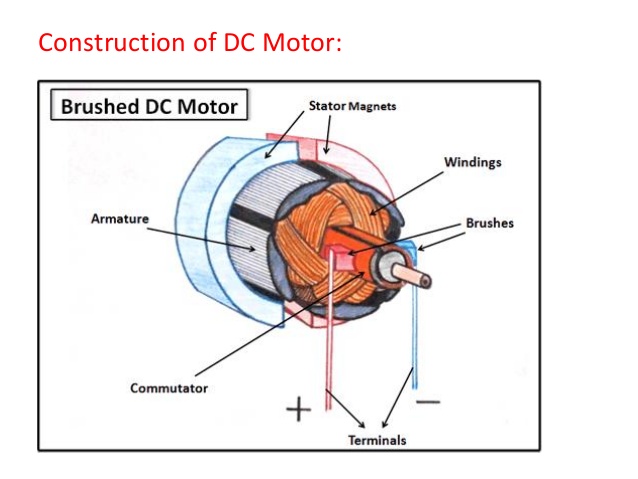
 In the current context, we are concerned about stepper motors and servo motors. They cannot be powered up using direct currents to them. Inside these motors, the structure is different and they require a set of controlled signals to function. The following diagram from electronics-tutorials illustrates the feedback loop inside a servo motor. A servo motor is functional using a PWM wave. Depending on the duty cycle, the rotational angle will be determined. PSLab device is capable of generating four different square waves at any duty cycle varying from 0% to 100%. This gives us freedom to acquire any angle we desire from a servo motor. The experiment “Servo Motors” implement the following method where it accepts four angles.
In the current context, we are concerned about stepper motors and servo motors. They cannot be powered up using direct currents to them. Inside these motors, the structure is different and they require a set of controlled signals to function. The following diagram from electronics-tutorials illustrates the feedback loop inside a servo motor. A servo motor is functional using a PWM wave. Depending on the duty cycle, the rotational angle will be determined. PSLab device is capable of generating four different square waves at any duty cycle varying from 0% to 100%. This gives us freedom to acquire any angle we desire from a servo motor. The experiment “Servo Motors” implement the following method where it accepts four angles. The last type of motor is stepper motor. As the name says it, this motor can produce steps. Inside of the motor, there are four coils and and five wires coming out of the motor body connecting these coils. The illustration from Wikipedia shows how four steps are acquired by powering up the respective coil in order. This powering up process needs to be controlled and hard to do manually. Using PSLab device experiment “Stepper Motor”, a user can acquire any number of steps just by entering the step value in the text box. The implementation consists of a set of method calls;
The last type of motor is stepper motor. As the name says it, this motor can produce steps. Inside of the motor, there are four coils and and five wires coming out of the motor body connecting these coils. The illustration from Wikipedia shows how four steps are acquired by powering up the respective coil in order. This powering up process needs to be controlled and hard to do manually. Using PSLab device experiment “Stepper Motor”, a user can acquire any number of steps just by entering the step value in the text box. The implementation consists of a set of method calls;
You must be logged in to post a comment.