

In this post, we shall explore the working principle and output signals of particulate matter sensors, and explore how the PSLab can be used as a data acquisition device for these.
Working Principle
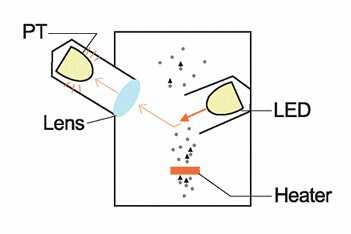
A commonly used technique employed by particulate matter sensors is to study the diffraction of light by dust particles, and estimate the concentration based on a parameter termed the ‘occupancy factor’. The following image illustrates how the most elementary particle sensors work using a photogate, and a small heating element to ensure continuous air flow by convection.
Occupancy Rate
Each time a dust particle of aerodynamic diameters 2.5um passes through the lit area, a phenomenon called Mie scattering which defines scattering of an electromagnetic plane wave by a homogenous sphere of diameter comparable to the wavelength of incident light, results in a photo-signal to be detected by the photosensor. In more accurate dust sensors, a single wavelength source with a high quality factor such as a laser is used instead of LEDs which typically have broader spectra.
The signal output from the photosensor is in the form of intermittent digital pulses whenever a particle is detected. The occupancy ratio can be determined by measuring the sum total of time when a positive signal was output from the sensor to the total averaging time. The readings can be taken over a fairly long amount of time such as 30 seconds in order to get a more accurate representation of the occupancy ratio.
Using the Logic analyzer to capture and interpret signals
The PSLab has a built-in logic analyzer that can acquire data signals up to 67 seconds long at its highest sampling rate, and this period is more than sufficient to record and interpret a dataset from a dust sensor. An inexpensive dust sensor, DSM501A was chosen for the readings, and the following results were obtained
- Dust sensor readings from an indoor, climate controlled environment. After the 100 second mark, the windows were opened to expose the sensor to the outdoor environment.
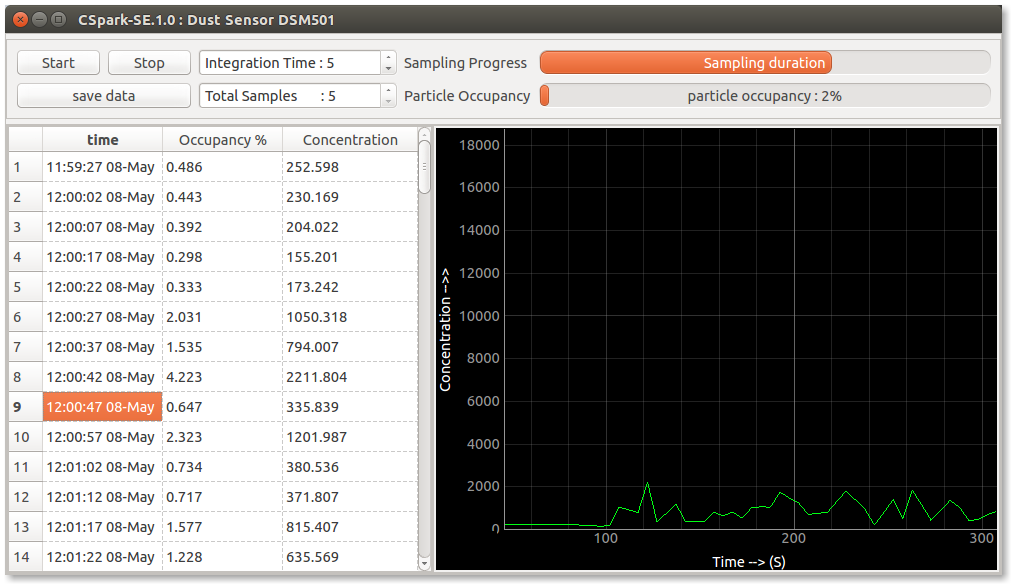
A short averaging time has resulted in large fluctuations in the readings, and therefore it is important to maintain longer averaging times for stable measurements.
Recording data with a python script instead of the app
The output of the dust sensor must be connected to ID1 of the PSLab, and both devices must share a common ground which is a prerequisite for exchange of DC signals. All that is required is to start the logic analyzer in single channel mode, wait for a specified averging time, and interpret the acquired data
Record_dust_sensor.py
from PSL import sciencelab #import the required library import time import numpy as np I = sciencelab.connect() #Create the instance I.start_one_channel_LA(channel='ID1',channel_mode=1,trigger_mode=0) #record all level changes time.sleep(30) #Wait for 30 seconds while the PSLab gathers data from the dust sensor a,_,_,_,e =I.get_LA_initial_states() #read the status of the logic analyzer raw_data =I.fetch_long_data_from_LA(a,1) #fetch number of samples available in chan #1 I.dchans[0].load_data(e,raw_data) stamps =I.dchans[0].timestamps #Obtain a copy of the timestamps if len(stamps)>2: #If more than two timestamps are available (At least one dust particle was detected if not self.I.dchans[0].initial_state: #Ensure the starting position of timestamps stamps = stamps[1:] - stamps[0] # is in the LOW state diff = np.diff(stamps) #create an array of individual time gaps between successive level changes lows = diff[::2] #Array of time durations when a particle was not present highs = diff[1::2] #Array of time durations when a particle was present low_occupancy = 100*sum(lows)/stamps[-1] #Occupancy ratio print (low_occupancy) # datasheets of individual dust sensors also provide a mathematical #equation to interpret the occupancy ratio as concentration of #particulate matter